Промышленные роботы
Промышленные роботы стали применяться со второй половины прошлого века. Основное назначение - выполнение двигательных и управляющих функций в производственном процессе. Исполнительное устройство было представлено в виде манипулятора, который имел несколько степеней свободы. Выполняемые операции: перенос деталей и заготовок от станка к станку или с конвейера на конвейер, дуговая и точечная сварка, нанесение покрытий распылением, контроль качества и др.
В настоящее время промышленные роботы также применяются для обработки материалов (модельное производства, обработка композитов, и других не твердых материалов). Невысокая жесткость не позволяет применять их для обработки твердых материалов и сталей. Однако высокая мобильность, большая зона обработки делает их применение для данных целей обоснованным.
Обработка с применением промышленных роботов немыслима без использования CAM систем. В настоящее время есть несколько программых продуктов, которые позволяют программировать роботообработку (с разной степенью сложности) на достаточно высоком уровне. К таким CAM системам можно отнести NX CAM, MasterCAM, Autodesk PowerMILL, SprutCAM.
Все указанные системы имеют специальный модуль или набор функций, который позволяет адаптировать рассчитанные стандартными средствами траектории в программу для робота.
Для успешного расчета управляющих программ робота требуется произвести настройку:
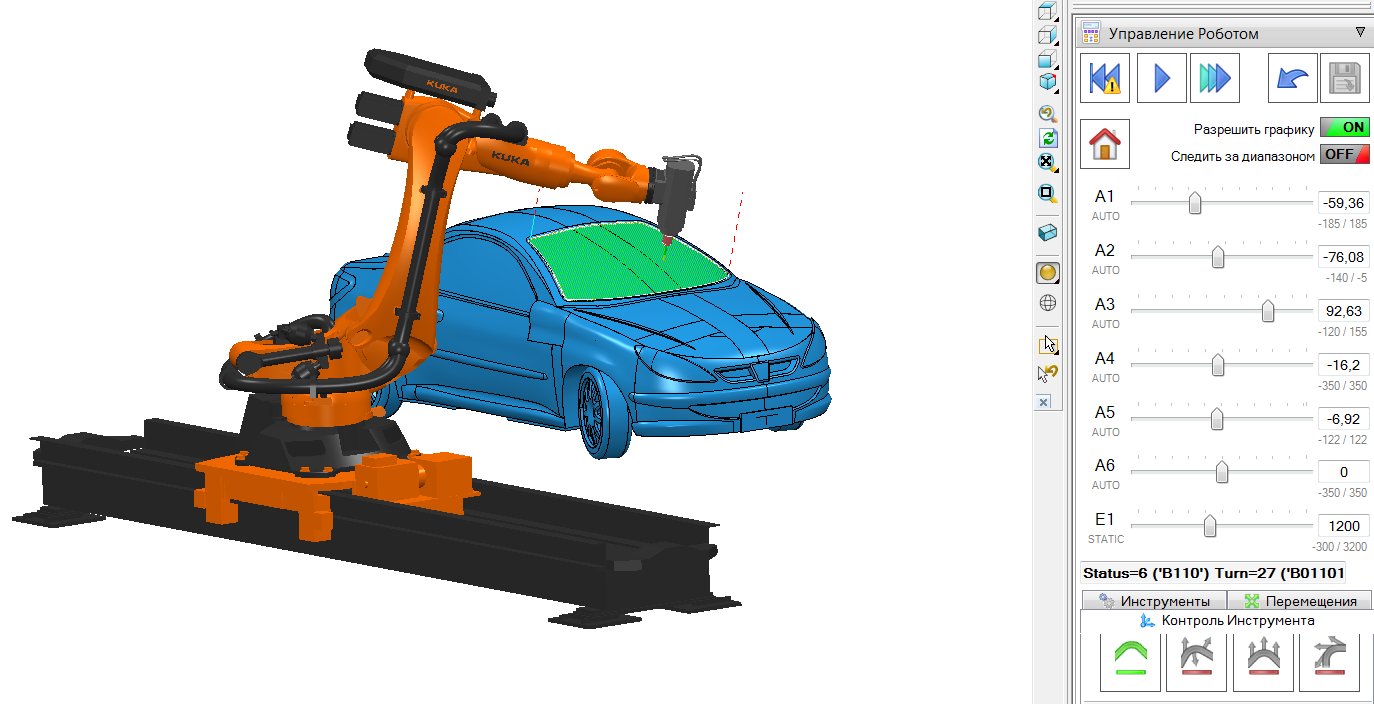
1). кинематической модели робота. Представляет из себя 3D модель с описанием возможностей робота: поворотные оси, угловые ограничения и другие. Она необходима для визуализации положения звеньев робота в процессе отработки программы. Пользователь визуально отслеживает движение исполнительного устройства (шпиндель, сварочный аппарат, механический захват), а также других звеньев в процессе отработки программы и может накладывать ограничения, добиваясь нужного результата. и наложения различных ограничений для управления движениями робота.
2). постпроцессора. Обеспечивает генерацию программы, соответствующей формату контроллера робота. Управляет конечным устройством закрепленным на фланце 6-ой оси робота. Также постпроцессор управляет внешними осями робота: поворотный стол (кaнтователь) и поворотно-наклонный стол, направляющая рельса.
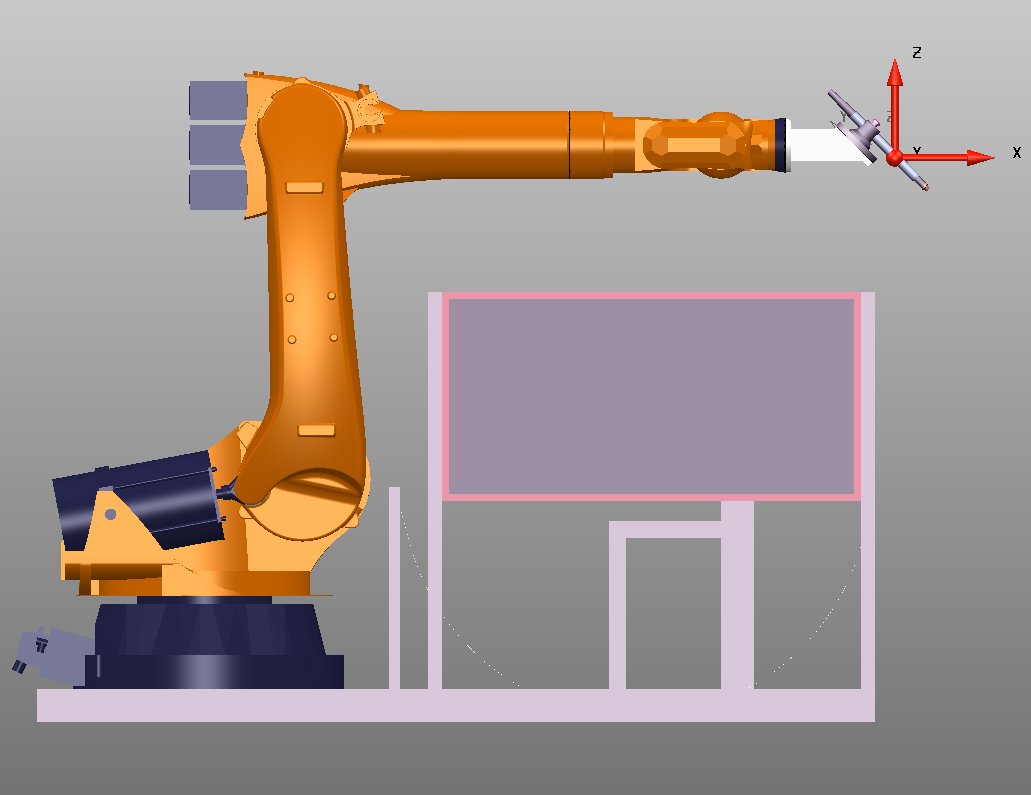
Пример: Создание кинематической схемы робота Kuka 240 L180
Подготовка 3D модели робота в CAD системе. Формирование ячейки робота.
Симуляция созданной кинематики в PowerMILL Robot
Отработка программы на роботе
Производим настройку всех необходимых компонентов для программирования обработки роботов (Kuka, Fanuc, ABB и другие) с помощью CAM систем.
На главную